Vorlesung7 ComputationalEngineering


Einführung in Computational Engineering – Vorlesung 7
Autoren: Andrej Felde und Thomas Hesse
Folien zur Vorlesung 7: Link
Folien zur Vorlesung 7 mit Annotationen: Link
Aufzeichnung der Vorlesung 7: Link
Übung 6: Link
Differentialgleichungslöser
Oft hat man es in der Praxis mit nichtlinearen Problemen zu tun. Hier wird nun versucht, eine effiziente Möglichkeit zu erarbeiten, mit der man die Gleichgewichtslösung einer nicht lineare Differentialgleichung bestimmen kann. Die Lösung dazu lautet "Differentialgleichungslöser". Mit den Differentialgleichungslösern versucht man im Allgemeinem stationäre Punkte oder eben nur einen stationären Punkt einer Differentialgleichung zu bestimmen. Dafür werden in der Regel Kontraktionen benutzt (selbst-abbildende Abbildungen). Im folgendem werden zwei Verfahren vorgestellt, welche den stationären Punkt (also die Gleichgewichtslage) einer Differentialgleichung bestimmen. Ein Beispiel für das zu bestimmende stationäre System sähe wie folgt aus:
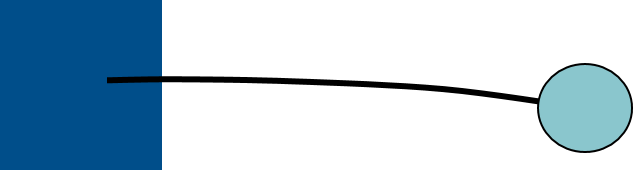
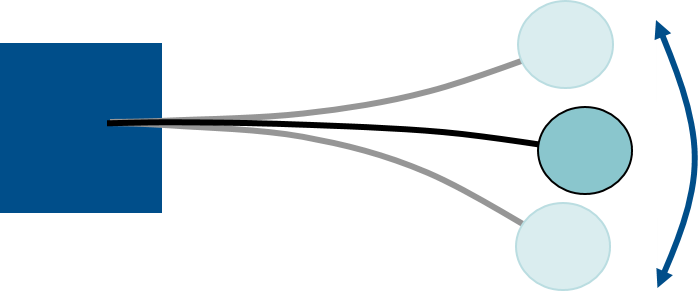
Transiente Phase
Die transiente Phase beschreibt genau den Zeitbereich, in dem das nicht lineare System sich nicht auf die Gleichgewichtslage einpendelt. Interessant ist demnach natürlich der Zustand des Systems nach der transienten Phase. Die Verfahren, welche zur Bestimmung der Gleichgewichtslage benutzt werden, versuchen gerade diese transiente Phase mit iterativen Ansätzen bis hin zur Gleichgewichtslösung  zu durchlaufen.
zu durchlaufen.
Fixpunktiteration
Allgemein handelt es sich bei der Fixpunktiteration um eine Abbildung, genauer eine Kontraktion. Eine Kontraktion ist eine Abbildung, die von sich wieder auf sich selbst abbildet, also eine selbst abbildende Abbildung. Für den Falle der Fixpunktiteration wird konkret von einem Banachraum nach einem Banachraum abgebildet. Ein Banachraum ist ein Vektorraum, auf dem eine Metrik (z.B. die euklidische Norm) definiert wurde und der vollständig ist. Das "vollständigkeits"-Kriterium ist genau dann erfüllt, wenn jeder Punkt des Raumes Cauchy-konvergent ist.
Die in der Vorlesung vorgestellte Form für die Fixpunktiteration einer nicht linearen Differentialgleichung  wäre demnach
wäre demnach  mit der Kontraktion
mit der Kontraktion  , da ja gerade
, da ja gerade  gelten muss!
gelten muss!
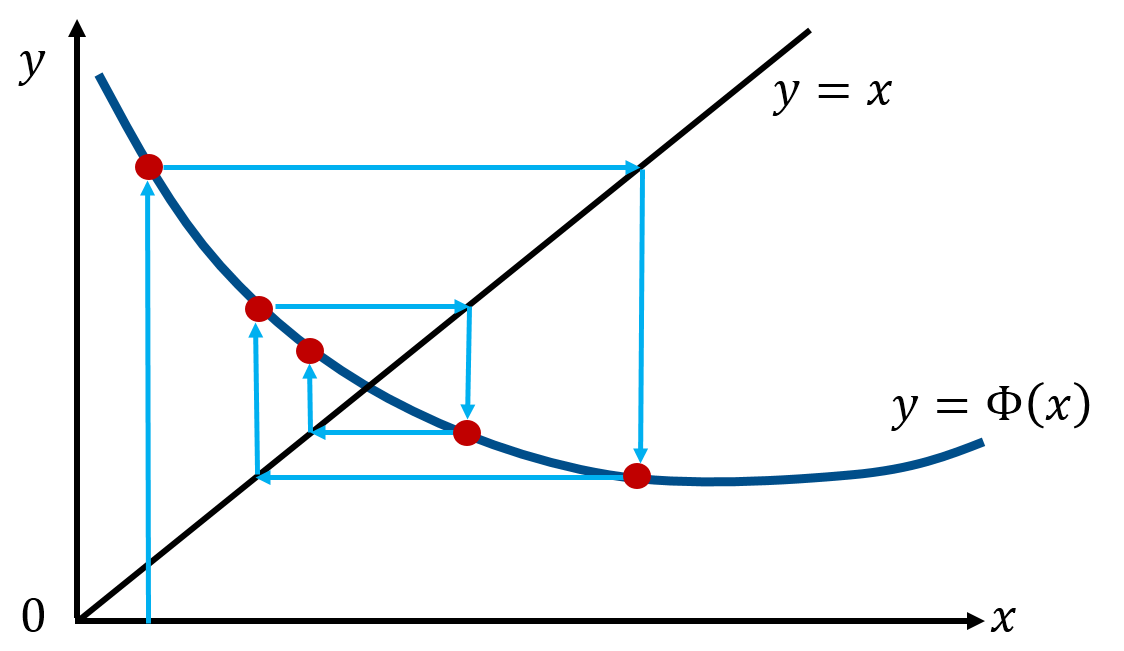
Beispiel
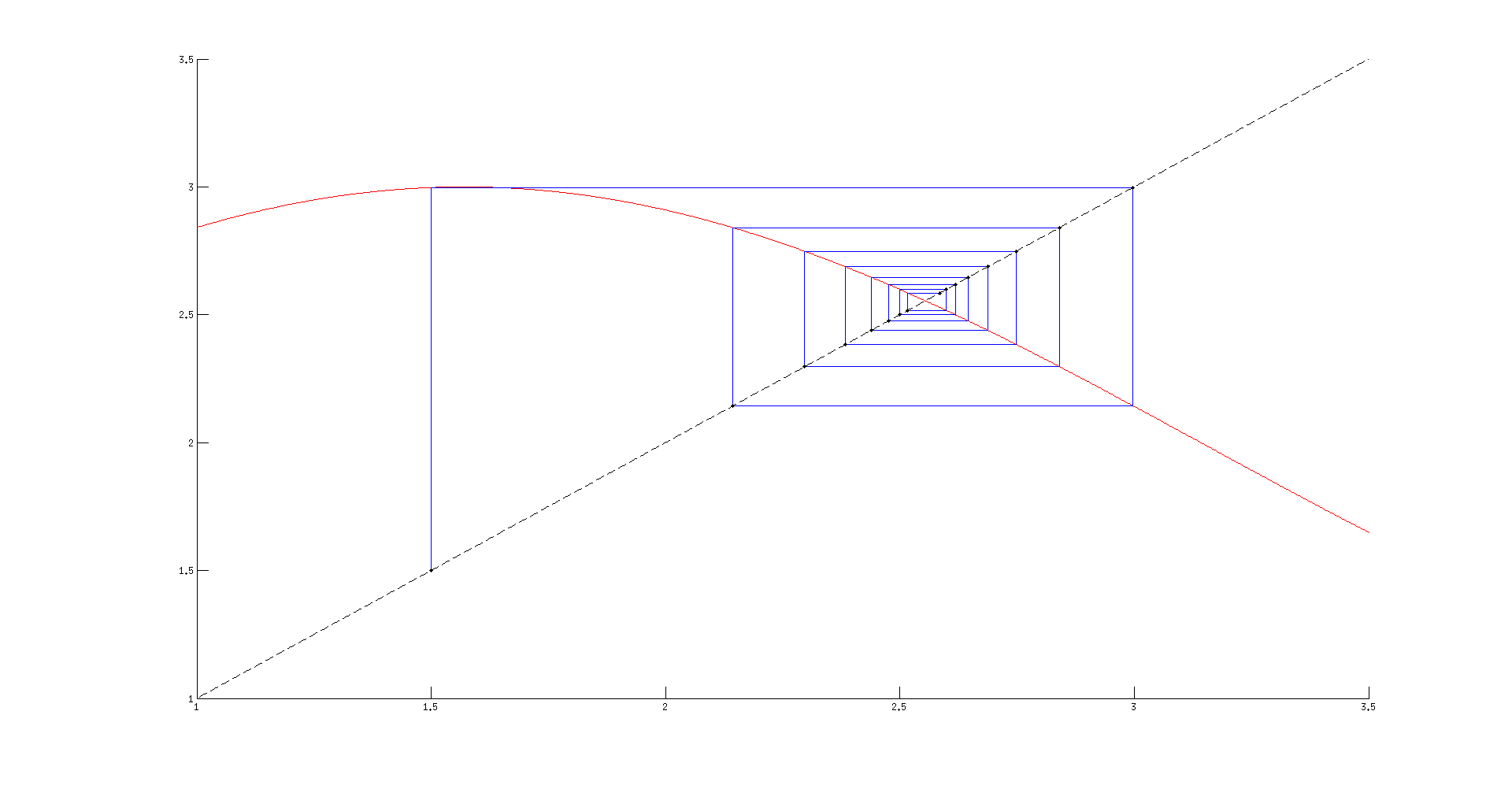
Man betrachte die Fixpunktiteration für die Kontraktion  mit dem Startwert
mit dem Startwert  . Die ersten 5 Iterationen sind wie folgt:
. Die ersten 5 Iterationen sind wie folgt:





[...] Führt man nun dieses Verfahren weiter fort, so erhält man zum Schluss den Fixpunkt  , welcher die Gleichgewichtslage an der ungefähren x-Position von ebenfalls
, welcher die Gleichgewichtslage an der ungefähren x-Position von ebenfalls  ergibt. Das Bild der Fixpunktiteration mit den ersten 15 Iteration kann man sich hier noch einmal genauer anschauen.
ergibt. Das Bild der Fixpunktiteration mit den ersten 15 Iteration kann man sich hier noch einmal genauer anschauen.
{kind=link}
Newton-Verfahren
Das Newton-Verfahren ist ein spezieller Fall der Fixpunktiteration genau dann, wenn die Folge gegen den Fixpunkt konvergiert. Das Newton-Verfahren wird ebenso wie die Linearisierung um die Gleichgewichtslage [1] mit dem Taylorpolynom ersten Grades hergeleitet, also bis zum linearen Term. Das Newton-Verfahren macht nichts anderes, als an bestimmten Funktionswerten zu linearisieren und den Wert an dem sich die x-Achse mit der Tangente schneidet als neuen Funktionswert zu verwenden. Hier zeichnet sich die iterative Vorgehensweise des Newton-Verfahrens ab. Die allgemeine Form der Newton Gleichung ist:
Ein Nachteil dieses Verfahrens ist die lokale Konvergenz. Durch die lokale Konvergenz kann es sein, dass das Verfahren zu große Schritte macht und deshalb divergiert.
Das Newton-Verfahren wird solange ausgeführt, bis es terminiert. Die zwei Terminierungskritierien sind:
- Nahe der Lösung – in diesem Falle erreicht das Newton-Verfahren die Gleichgewichtslösung oder befindet sich in
 -Nähe zu der Gleichgewichtslösung
-Nähe zu der Gleichgewichtslösung
- Kein Fortschritt – festgelegte "Fortschrittsgrenze" wird zwischen den Iterationen unterschritten, ansonsten kann man ein Maximum an Iterationen festlegen
Beispiel
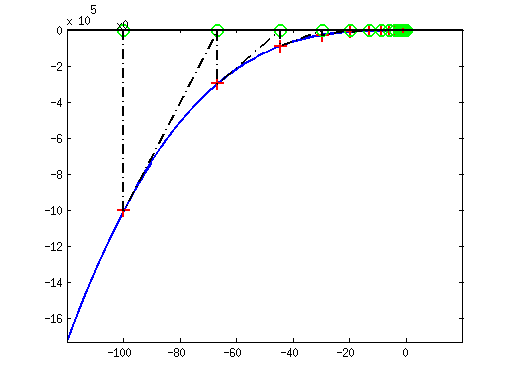
Also Beispiel wird hier das Newton-Verfahren angeführt bezüglich der Funktion  . Hier wird versucht mit dem Startwert
. Hier wird versucht mit dem Startwert  die Nullstelle der Funktion, bzw. des Polynoms, zu finden. Hier sieht man schön, wie an die Funktion von der die Nullstelle gesucht ist eine Tangente angelegt wird. Der Schnittpunkt der Tangente mit der x-Achse bildet den Eingangsparameter für die nächste Iteration des Newton-Verfahren. Dies wird dann so häufig wiederholt, bis das Newton-Verfahren konvergiert. Die Konvergenz ist erreicht, wenn z.B. nur noch sehr kleine Schritte gemacht werden und diese eine festgelegte Toleranz unterschreiten, also
die Nullstelle der Funktion, bzw. des Polynoms, zu finden. Hier sieht man schön, wie an die Funktion von der die Nullstelle gesucht ist eine Tangente angelegt wird. Der Schnittpunkt der Tangente mit der x-Achse bildet den Eingangsparameter für die nächste Iteration des Newton-Verfahren. Dies wird dann so häufig wiederholt, bis das Newton-Verfahren konvergiert. Die Konvergenz ist erreicht, wenn z.B. nur noch sehr kleine Schritte gemacht werden und diese eine festgelegte Toleranz unterschreiten, also  wobei z.B.
wobei z.B.  .
.
Schrittweitensteuerung
Eine allgemeine Faustregel zur Wahl der Schrittweite ist, sie so "klein wie nötig und so groß wie möglich" zu wählen. Dabei ist die Schrittweite
 so zu wählen, dass
so zu wählen, dass  . Hierbei ist
. Hierbei ist  wünschenswert, da man damit quadratische Konvergenz für das Verfahren erreicht, es also schneller konvergiert.
wünschenswert, da man damit quadratische Konvergenz für das Verfahren erreicht, es also schneller konvergiert.
Die Schrittweite liesse sich damit zum Beispiel mit  bestimmen.
bestimmen.
Selbstest
Links auf dieser Seite
[1] Linearisierung um die Gleichgewichtslage
Feedback
Bei Fehlern oder Anregungen zu dieser Seite schicken Sie bitte eine Email an andrej.felde@stud.tu-darmstadt.de oder thomas.hesse@stud.tu-darmstadt.de.